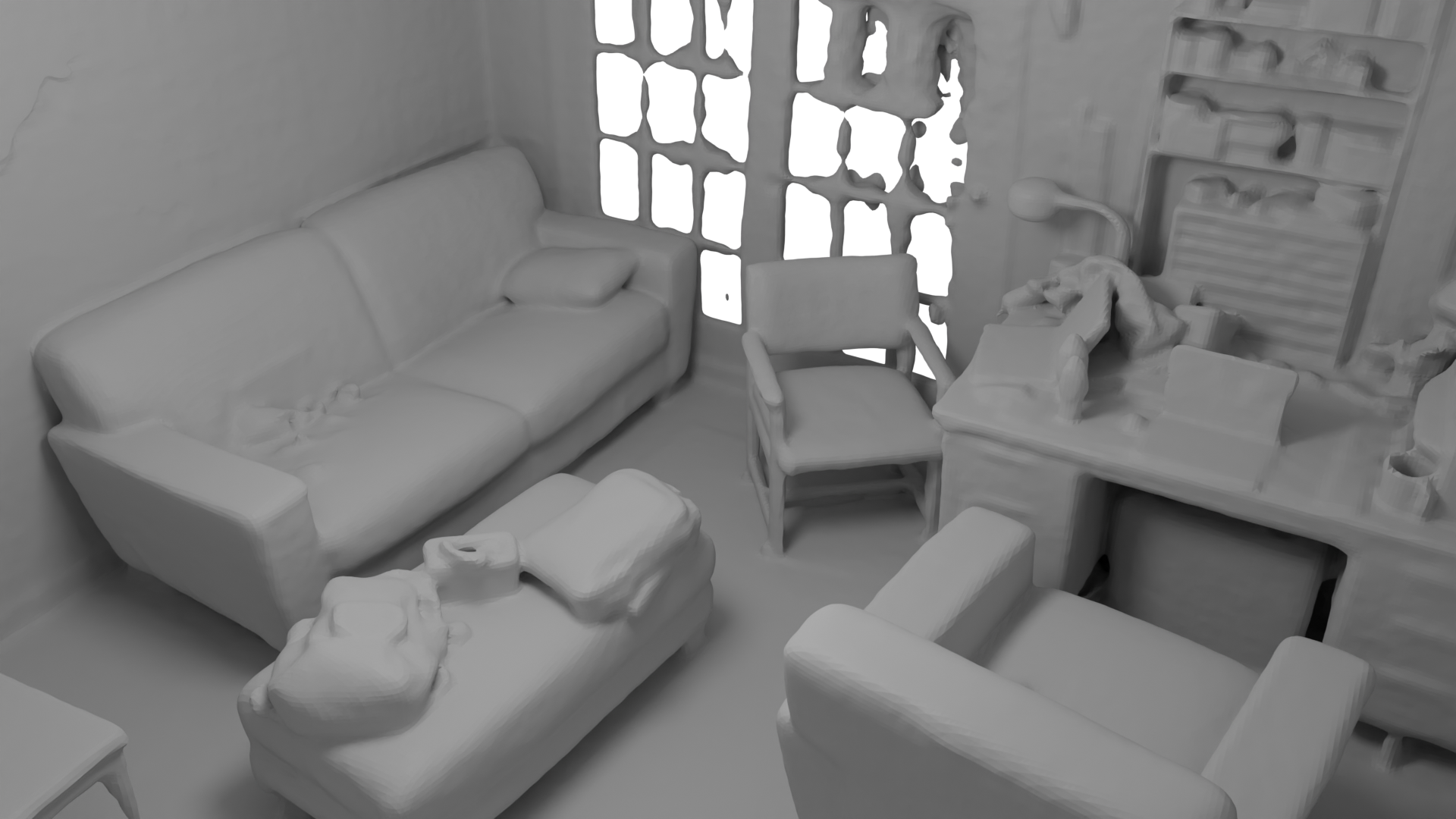
Results
We test our method on the ScanNet dataset which provides RGB-D sequences of room-scale scenes. We compare our method to the original ScanNet BundleFusion reconstructions which often suffer from severe camera pose misalignment. Our approach jointly optimizes for the scene representation network as well as the camera poses, leading to substantially reduced misalignment artifacts in the reconstructed geometry.